- Устройства поворота солнечных батарей космических аппаратов
- Система управления положением солнечных батарей космического аппарата. Контроллер поворота солнечной панели Поворот солнечных батарей
- Принцип построения систем управления поворотом солнечных батарей
- Система управления поворотом солнечных панелей на базе часового механизма
- Принцип водяных часов в системе управления поворотом солнечных панелей
- Электронные системы поворота
- Принцип работы
- Положительные стороны
- Как сделать своими руками
- Часовой механизм поворота
- Водяные часы
- Видео
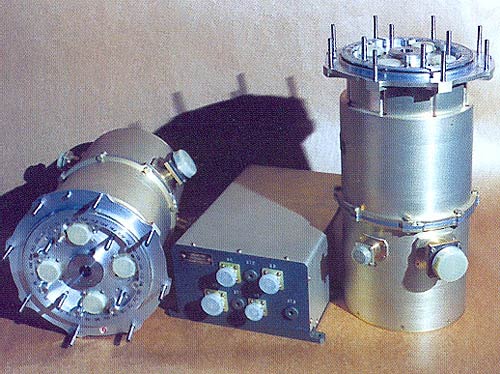
Устройства поворота солнечных батарей космических аппаратов










Системы ориентации солнечных батарей малых космических аппаратов
АО «Корпорация «ВНИИЭМ» разработаны систем ориентации солнечных батарей (СОСБ) для дискретного наведения ориентируемых солнечных батарей (СБ) на Солнце со скоростями движения выходных валов приводов СБ от 0,25 до 0,75 град/сек. Разработаны СОСБ с автономным управлением (например, система 830 для КА «Метеор-М»), а так же с управлением от бортового вычислительного комплекса космического аппарата.
Срок активного существования СОСБ до 12,5 лет.
Система ориентации солнечных батарей для космических аппаратов «Монитор-Э», «КазСат», «Экспресс-МД»
Система ориентации солнечных батарей предназначена для независимой одностепенной ориентации каждой из двух панелей СБ по командам бортовой цифровой вычислительной машины системы ориентации и стабилизации космического аппарата (КА), формируемым в зависимости от положения Солнца относительно осей КА и сигналам об угловом положении выходных валов приводов СБ относительно корпуса КА.
В процессе ориентации солнечных батарей система обеспечивает транзитную передачу электроэнергии, генерируемой СБ, и транзитную передачу сигналов от приборов, установленных на панелях СБ.
| Состав системы: | 2 блока привода, 1 блок управления. |
| Угол разворота СБ: | не ограничен |
| Скорость разворота СБ, 0 /с: | 0 — 0,6 |
| Максимальный момент инерции на валу привода относительно оси вращения, кг . м 2 : | 100 |
| Максимальный ток СБ, А: | 60 |
| Параметры токосъемника, А: 4 цепи 6 цепей | на 30 0,0015 – 2 |
| Информация об угловом положении выходного вала привода с дискретностью, град: | 6 |
| Максимальная потребляемая мощность, Вт: | 20 |
| Среднесуточное потребление, Вт: | 3 |
| Масса системы, кг: | 18 (2х7,5+3) |

Система ориентации солнечных батарей космических аппаратов (система Р10)
Система ориентации солнечных батарей космических аппаратов (система Р10) предназначена для независимой ориентации левой и правой панелей СБ путем поворота вокруг осей, параллельных вектору направления полёта (ориентация по крену), и поворота вокруг продольных осей панелей СБ (ориентация по тангажу).
Ориентация осуществляется по командам локального контроллера бортовой вычислительной сети в зависимости от положения Солнца относительно осей космического аппарата и сигналов положения панелей СБ, формируемых в системе ориентации. В процессе ориентации система ориентации солнечных батарей обеспечивает транзитную передачу электроэнергии, генерируемой СБ, и транзитную передачу сигналов от приборов, установленных на панелях СБ.
Источник
Система управления положением солнечных батарей космического аппарата. Контроллер поворота солнечной панели Поворот солнечных батарей
При строительстве загородных домов, домиков на дачных участках, теплиц, различных фермерских построек все чаще стали применяться автономные системы электрообеспечения. Солнечные батареи обеспечивают независимость от общих электрических сетей. Да и в городах в частном секторе нередко можно увидеть на крышах домов солнечные панели домашних электростанций.
Эти панели могут быть с моно- и поликристаллическими кремниевыми структурами, могут быть построены на базе батарей, выполненных по аморфной или микроморфной технологии, могут быть даже использованы солнечные батареи, выполненные по технологии «Moth Eye» («Глаз мотылька»). При этом каждое здание строится таким образом, чтобы солнечные панели были установлены в месте, максимально освещаемом солнцем.
Эффективность современных гелиевых систем в среднем не превышает 18% — 20%. У лучших образцов эффективность может достигать 25%. В 2014 году ученые Австралийского центра UNSW по усовершенствованию фотовольтаики сообщили, что им удалось добиться эффективности солнечных батарей в 40%.
При этом нужно понимать, что измерение величины эффективности производится, когда гелиевая панель освещается солнцем под прямым углом. Если солнечная батарея закреплена стационарно, то в течение дня, когда солнце перемещается по небосводу, период прямого освещения батареи солнцем будет относительно небольшим. И поэтому эффективность даже самых совершенных солнечных панелей будет снижаться.
Для того чтобы минимизировать снижение эффективности гелиевых систем, солнечные панели должны устанавливаться на поворотных модулях, которые позволят в течение всего светового дня ориентировать батареи на солнце. Такое поворотное устройство, на котором закреплена несущая конструкция с одной или несколькими солнечными панелями, называется трекером.
Он предназначен для того, чтобы следить за солнцем, и, в зависимости от его положения, ориентировать на него солнечную панель. Это устройство, в зависимости от исполнения, включает в себя один или два датчика слежения за солнцем, а также поворотный механизм. Трекер должен быть установлен в хорошо освещаемом солнцем месте на земле, на стационарной станине, либо на мачте, которая поднимет трекер на такую высоту, чтобы солнечная батарея всегда была освещена солнцем.
Трекер с четырьмя солнечными панелями на мачте
Даже простейшее поворотное устройство с системой слежения за солнцем позволяет получить максимальный коэффициент полезного действия от гелиевых батарей. Как показали исследования, при отсутствии должной ориентации солнечных панелей на солнце теряется до 35% мощности. Поэтому, чтобы выйти на запланированную мощность в случае неподвижного крепления фотоэлементов, приходится устанавливать большее количество панелей.
Принцип построения систем управления поворотом солнечных батарей
Промышленностью выпускается несколько видов систем управления поворотом солнечных батарей. Это достаточно дорогие (до 100000 рублей) устройства, которые могут управлять положением сразу нескольких гелиевых панелей.
Поскольку солнце в течение дня перемещается не только по горизонтали, но и по вертикали, то эти системы управления отслеживают оба изменения положения и, в соответствии с полученной информацией, выдают команды на поворот панели вокруг горизонтальной или вертикальной осей. В общем случае такая система управления состоит из солнечного датчика, преобразователя (П) сигнала с этого датчика, усилителя (У) сигнала, микроконтроллера (МК), устройства управления двигателем (УУД), самого двигателя и, наконец, непосредственно рамы, на которой крепится гелиевая панель.

Схема управления трекера
Характерно, что для управления поворотом в обеих осях используется одна и та же схема. Различны только датчики положения солнца и двигатели. Простейший датчик положения солнца состоит из двух фотодиодов, разделенных непрозрачной перегородкой.
В зависимости от того, за каким перемещением следит этот датчик, перегородка устанавливается горизонтально или вертикально, но обязательно направлена строго на солнце. Пока оба фотодиода освещаются одинаково, сигналы, поступающие с них, равны. Как только солнце переместится настолько, что один из фотодиодов окажется в тени перегородки, происходит разбаланс сигналов и система управления вырабатывает соответствующую команду на поворот солнечной батареи.

Схема датчика положения солнца
В качестве двигателей для поворотной платформы используются, как правило, шаговые двигатели или реактивно-вентильные двигатели. В таких системах управления датчики слежения установлены на этой же платформе и поворачиваются вместе с нею, обеспечивая тем самым точную ориентацию гелиевой панели на солнце. Для надежной работы датчика необходимо предусмотреть защиту его от загрязнения, налипания снега, затенения оптики случайными предметами.
Существуют системы управления, в которых датчики слежения удалены от несущей поворотной платформы и находятся в месте, защищенном от подобных воздействий. В этом случае сигнал с датчиков поступает на сельсин-передатчик. Ориентируя датчик слежения на солнце, сельсин-передатчик передает управляющее воздействие на сельсин-приемник, который и поворачивает несущую платформу, направляя ее точно на солнце.
Система управления поворотом солнечных панелей на базе часового механизма
Промышленные установки – полностью укомплектованные гелиевые электростанции с двухосными поворотными модулями – достаточно дорогое удовольствие. Например, промышленный трекер UST-AADAT стоит порядка полутора миллионов рублей. Естественное желание всех владельцев солнечных электростанций – повысить выходную мощность, но при этом сократить расходы. В результате появились самодельные устройства, оригинальные по своему решению, в которых используются подручные материалы. И эти устройства вполне успешно управляют ориентацией панелей на солнце.
Один из вариантов такого устройства – система управления ориентацией гелиевых панелей, построенная на базе часового механизма. Для слежения за солнцем вовсе не обязательно использовать светоприемные устройства. Для этого достаточно взять обычные настенные механические часы. Подойдут даже старые ходики. Известно, что за один час солнце проходит по небосводу с востока на запад путь, соответствующий угловому перемещению на 15°. Поскольку для гелиевой панели такое угловое смещение не особенно критично, то достаточно включать поворотный механизм один раз в час.

Слежение за перемещением солнца по часам
Устройство для поворота гелиевой панели вокруг вертикальной оси может выглядеть следующим образом. В циферблате на расстоянии длины минутной стрелки от центра, в месте, соответствующем 12-ти часам, устанавливается неподвижный контакт. Подвижный контакт – на острие минутной стрелки.
Таким образом, каждые 60 минут будет происходить замыкание контактов и включаться двигатель, поворачивающий солнечную панель. Отключение двигателя можно организовать различными способами, например, конечным выключателем или реле времени. Если на циферблате установить еще один неподвижный контакт в месте, соответствующем 6-ти часам, то коррекция положения панели будет производиться через каждые полчаса.
В этом случае устройства отключения двигателя должны быть настроены на поворот несущей платформы на угол 7,5°.
Кроме того, при желании здесь же, на этом механизме, с помощью еще одной контактной группы, но уже на базе часовой стрелки можно собрать схему автоматического возврата солнечной панели в исходное положение. На базе этой же часовой стрелки можно собрать систему управления поворотом панели и вокруг горизонтальной оси. Пока часовая стрелка двигается до 12-ти часов, несущая рама поднимается вслед за солнцем. После 12-ти часов двигатель горизонтальной оси реверсируется, и солнечная панель начинает вращаться в обратном направлении.
Принцип водяных часов в системе управления поворотом солнечных панелей
Эта система была придумана девятнадцатилетней студенткой Иден Фулл из Канады. Она предназначена для управления одноосным трекером. Принцип работы следующий. Вращение производится вокруг горизонтальной оси. Солнечная панель устанавливается в начальное положение таким образом, чтобы солнечные лучи были перпендикулярны плоскости панели.
На одну сторону панели подвешивается емкость с водой, на противоположную сторону подвешивается груз, равновесный с емкостью, наполненной водой. В нижней части емкости проделывается небольшое отверстие, чтобы вода по каплям вытекала из этого сосуда. Размер этого отверстия подбирается экспериментально. По мере вытекания воды сосуд становится легче, и противовес медленно поворачивает раму с панелью.

Трекер на «водяных часах»
Подготовка трекера к работе заключается в том, что в опустевшую емкость заливается вода и солнечная панель устанавливается в исходное положение.
Эти два примера далеко не исчерпывают возможные варианты построения поворотных модулей. При небольшой фантазии можно получить простое, но очень эффективное устройство, которое гарантированно сможет повысить эффективность домашней гелиевой электростанции.
Система поворота солнечной батареи содержит корпус, полый вал с фланцем для стыковки солнечной батареи, привод для ее вращения, силовое и телеметрическое токосъемные устройства. Выходной вал функционально разделен на силовой фланец и вал с силовым токосъемным устройством. Телеметрическое токосъемное устройство установлено на своем валу и связано с выходным валом. Фланец выходного вала установлен в корпусе системы поворота солнечной батареи на опорном подшипнике с предварительным натягом или его поджатием через опорный подшипник к корпусу системы поворота солнечной батареи пружинами. Повышается надежность и снижаютса массы и габариты устройства. 1 з.п. ф-лы, 1 ил.
Изобретение относится к космической технике и может быть использовано при проектировании системы поворота солнечной батареи (СПСБ).
Настоящее изобретение предназначено для вращения солнечной батареи (СБ) и передачи электроэнергий с солнечной батарей на космический аппарат.
Известна система поворота солнечной батарей (СПБС), патент US №4076191, состоящая из корпуса, вала с двумя фланцами для стыковки двух крыльев солнечной батарей, привода, токосъемных устройств. Силовые, передающие электрическую энергию, и телеметрические, передающие команды и телеметрическую информацию, токосъемные устройства расположены на валу, при этом привод поворачивает оба крыла СБ. Данное изобретение взято в качестве прототипа.
Недостатком этого устройства является наличие одного нерезервированного привода и, как следствие, пониженная живучесть аппарата. Вторым недостатком является массивная конструкция вала, обусловленная выполнением требования по необходимой изгибной жесткости вала. Кроме того, большой диаметр вала приводит к повышенному трению и износу токосъемных устройств.
Технической задачей изобретения является повышение надежности системы, снижение массы конструкции и повышение функциональных возможностей.
Поставленная задача достигается тем, что у СПБС, имеющего корпус, привод и вал, выходной вал устройства выполняется полым с силовым фланцем на конце. При этом силовое токосъемное устройство расположено на выходном валу снаружи, а телеметрическое установлено на своем валу. Телеметрическое токосъемное устройство соединено с выходным валом СПБС. Фланец выходного вала установлен на опорный подшипник с плоскими кольцами или поджат к корпусу пружинами. Участок выходного вала с установленным силовым токосъемным устройством исключен из жесткостной схемы конструкции и имеет размеры, оптимальные для обеспечения минимальной массы и необходимого ресурса токосъемного устройства.
Суть изобретения поясняется чертежом, где на фиг.1 изображен общий вид заявленного устройства с разрезом.
Система поворота солнечной батареи состоит из корпуса 1, привода 2, выходного вала 3, установленного на опорном подшипнике 4, силового токосъемного устройства 6, расположенного на выходном валу 3, и телеметрического токосъемного устройства 7, установленного на своем валу. Телеметрическое токосъемное устройство 7 может быть установлено во внутренней полости выходного вала 3 или снаружи и с ним связано. Повышенная жесткость конструкций достигается постоянным поджатием вала 3 к корпусу 1 за счет предварительного натяга опорного подшипника или поджатия тарельчатыми пружинами 8. Повышенная точность положения оси вращения выходного вала 3 достигается опорным подшипником с плоскими опорными кольцами 9. Зубчатое колесо 10 установлено на валу 5 привода 2. Зубчатое колесо 11 установлено на выходном валу 3.
При работе СПСБ привод 2 передает вращение на выходной вал 3. Вращение от привода на выходной вал 3 передается зубчатой передачей с зубчатыми колесами 10, 11.
Токосъемные устройства 6 и 7 передают электрическую энергию, команды и сигналы с вращающейся солнечной батареи на космический аппарат как при вращении, так и в остановленном состоянии. Постоянное поджатие выходного вала 3 к корпусу 1 через опорный подшипник 4 обеспечивается тарельчатыми пружинами 8 как при вращении, так и при остановке выходного вала.
Повышенная живучесть космического аппарата обеспечивается применением по одной СПСБ на каждое крыло СБ. Даже при отказе СПСБ одного крыла аппарат будет получать электрическую энергию с другого крыла и обеспечивать работу главных потребителей.
Снижение веса конструкции обеспечивается тем, что выходной вал 3 функционально разделен на силовой фланец до опорного подшипника 4 и вал силового токосъемного устройства. Силовой фланец может располагаться как внутри корпуса СПСБ, так и снаружи, как показано на фиг 1. Вал имеет меньшие габариты, меньшую массу и увеличенную изгибную жесткость за счет замыкания силовой схемы конструкции с фланца выходного вала непосредственно на корпус через опорный подшипник.
Усилие поджатия опорного подшипника (или предварительный натяг опорного четырехточечного подшипника) выбрано из следующего условия нераскрытия стыка при эксплуатационных нагрузках:
Р — усилие поджатия опорного подшипника, Н·м;
M — приведенный изгибающий момент при работе в штатном режиме, Н;
Уменьшение массы токосъемных устройств и повышение их ресурса работы достигается за счет того, что участок вала с установленным силовым токосъемным устройством исключен из жесткостной схемы конструкции и имеет размеры, оптимальные для токосъемного устройства. Телеметрическое токосъемное устройство капсульного типа установлено на своем валу, например, внутри выходного вала или стыкуется снаружи и имеет минимальную массу. Повышенный ресурс токосъемных устройств достигается возможностью реализации их с минимальным диаметром скользящих колец и, соответственно, пониженным трением.
Меньшие потери на трение токосъемных устройств позволяют уменьшить мощность привода, что приводит к снижению массы приводной части СПСБ.
В настоящее время на предприятии выпущена конструкторская документация на СПСБ заявленной конструкции и проведена наземная экспериментальная отработка системы. Испытания показали существенное уменьшение массы системы, увеличение ресурса работы, повышение жесткостных характеристик и надежности системы.
1. Система поворота солнечной батареи, имеющая корпус, полый вал с фланцем для стыковки солнечной батареи, привод для ее вращения, силовое и телеметрическое токосъемные устройства, отличающаяся тем, что выходной вал функционально разделен на силовой фланец и вал с силовым токосъемным устройством, а телеметрическое токосъемное устройство установлено на своем валу и связано с выходным валом, при этом фланец выходного вала установлен в корпусе системы поворота солнечной батареи на опорном подшипнике с предварительным натягом или его поджатием через опорный подшипник к корпусу системы поворота солнечной батареи пружинами.
2. Устройство по п.1, отличающееся тем, что усилие предварительного натяга или поджатия опорного подшипника выбрано из следующего условия нераскрытия стыка при эксплуатационных нагрузках:
P>2·K·M/D,
где Р — усилие предварительного натяга или поджатия опорного подшипника, Н·м;
K — коэффициент запаса по внешним нагрузкам;
М — приведенный изгибающий момент при работе в штатном режиме, Н;
D — рабочий диаметр опорного подшипника (по шарикам), м.
Изобретение относится к оборудованию космических аппаратов (КА) и, в частности, к подвижным элементам конструкции КА, имеющим электрическую связь с системой управления КА, например батареям солнечным (БС), антеннам, подвижным крышкам и др.
Изобретение относится к управлению ориентацией космического аппарата (КА) с неподвижными относительно корпуса КА панелями солнечных батарей (СБ). .
Изобретение относится к области космической техники и может быть использовано для определения и контроля интегральных параметров лучистого теплообмена планеты, вокруг которой обращается космический аппарат (КА).
Изобретение относится к космической технике и может быть использовано при проектировании выносных конструкций космических аппаратов, преимущественно антенн и солнечных батарей. Подкос солнечной батареи содержит двухзвенный механизм, на общей двум звеньям оси которого установлена пружина кручения с устройствами взведения. Одно звено установлено на раме солнечной батареи, а другое на корпусе космического аппарата. Перпендикулярно оси на одном из звеньев расположен подпружиненный шток для фиксации в конечном положении. На конце подпружиненного штока с возможностью поворота установлено коромысло, на обоих концах которого жестко закреплены подшипники качения, взаимодействующие с конусными пазами копиров, жестко установленных на противоположном подпружиненному штоку звене. В звеньях двухзвенного механизма выполнены отверстия под устройство фиксации начального положения звеньев, закрепленное посредством резьбового соединения. Достигается повышение надежности в работе подкоса и упрощение процесса установки солнечной батареи на корпус космического аппарата. 13 ил.
Изобретение относится к системам электроснабжения космических аппаратов (КА) с использованием солнечных батарей (СБ). Способ заключается в том, что определяют заданный угол СБ, измеряют ее текущий угол и вычисляют расчетный угол по угловой скорости СБ и времени ее вращения. Определяют углы разгона (αРАЗГ) и торможения (αТОРМ) СБ. Вращают СБ до достижения порога отпускания (αОТП ≈ αТОРМ), когда прекращается рассогласование между заданным и расчетным углами СБ. Перед началом управления запоминают заданный угол и принимают начальное значение расчетного угла за достоверное значение текущего угла. Задают порог рассогласования (αПР) этих углов исходя из углов αРАЗГ и αТОРМ, а также минимально допустимого и максимально возможного токов СБ. Разбивают круг датчика угла на равные дискретные сектора (ДС) величиной σ при условии: αРАЗГ + αТОРМ Составные элементы трекера
Создание поворотного устройства для солнечных панелей своими руками включает в себя те же комплектующие, что и заводские товары.
Список обязательных деталей для создания такого устройства:
- Основа или каркас – состоит из несущих деталей, которые подразделяются на две категории – это подвижные и неподвижные. В некоторых случаях каркас имеет подвижную часть лишь с одной осью – горизонтальной. Однако есть модели и с двумя осями. В таких случаях нужны актуаторы, которые управляют вертикальной осью.
- Описанный ранее актуатор также должен входить в конструкцию и обладать устройствами не только поворота, но и устройствами контроля за этими действиями.
- Необходимы детали, которые будут защищать устройство от капризов погоды – гроза, сильный ветер, дождь.
- Возможность удаленного управления и доступа к поворотному устройству.
- Элемент, преобразующий энергию.
Но стоит отметить, что сбор такого устройства иногда дороже, чем покупка уже готового, а потому в некоторых случаях упрощается до несущих деталей, актуатора, управление актуатором.

Электронные системы поворота
Принцип работы
Принцип работы поворотного устройства очень прост и держится на двух деталях, одна из которых механическая, а другая электронная. Механическая часть поворотного устройства соответственно отвечает за поворот и наклон батареи. А электронная часть регулирует моменты времени и углы наклона, по которым действует механическая часть.
Электрооборудование, используемое вместе с солнечными батареями, заряжается от самих же батарей, что в некотором роде также экономит средства на подпитку электроники.

Положительные стороны
Если говорить о достоинствах электронного оборудования для поворотного устройства, то стоит отметить удобство. Удобство заключается в том, что электронная часть устройства будет в автоматическом режиме управлять процессом поворота батареи.
Данное преимущество не единственное, а является лишь еще одним в списке тех, что были перечислены ранее. То есть помимо экономии средств и повышения КПД, электроника освобождает человека от надобности вручную осуществлять поворот.

Как сделать своими руками
Создать трекер для солнечных батарей своими руками несложно, так как схема его создания проста. Для того чтобы создать работоспособную схему трекера своими руками необходимо иметь в наличии два фоторезистора. Кроме этих составляющих, нужно также приобрести моторное устройство, которое будет поворачивать батареи.
Подключение этого устройства осуществляется при помощи Н – моста. Этот метод подключения позволит преобразовывать ток силой до 500 мА с напряжением от 6 до 15 В. Схема сборки позволить не только понять, как работает трекер для солнечных батарей, но и создать его самому.
Чтобы настроить работу схемы, необходимо провести следующие действия:
- Удостовериться в наличия питания на схему.
- Провести подключение двигателя с постоянным током.
- Установить фотоэлементы нужно рядом, чтобы добиться одинакового количества солнечных лучей на них.
- Необходимо выкрутить два подстроечных резистора. Сделать это нужно против часовой стрелки.
- Запускается подача тока на схему. Должен включиться двигатель.
- Вкручиваем один из подстроечников до тех пор, пока он не упрется. Помечаем это положение.
- Продолжить вкручивание элемента до тех пор, пока двигатель не начнет крутиться в противоположную сторону. Помечаем и это положение.
- Делим полученное пространство на равные отделы и посередине устанавливаем подстроечник.
- Вкручиваем другой подстроечник до тех пор, пока двигатель не начнет немного дергаться.
- Возвращаем подстроечник немного назад и оставляем в таком положении.
- Для проверки правильности работы можно закрывать участки солнечной батареи и смотреть за реакцией схемы.

Часовой механизм поворота
Устройство часового механизма поворота в основе своей довольное простое. Для того чтобы создать такой принцип работы, нужно взять любые механические часы и соединить их с двигателем солнечной батареи.
Для того чтобы заставить работать двигатель, необходимо установить один подвижный контакт на длинную стрелку механических часов. Второй неподвижный закрепляется на двенадцати часах. Таким образом, каждый час, когда длинная стрелка будет проходить через двенадцать часов, контакты будут замыкаться, и двигатель будет поворачивать панель.
Временной промежуток в один час, выбран исходя из того, что за это время солнечное светило проходит по небу около 15 градусов. Установить еще один неподвижный контакт можно на шесть часов. Таким образом, поворот будет проходить каждые полчаса.
Водяные часы
Данный способ управления поворотным устройством был изобретен одной предприимчивой канадской студенткой лет и отвечает за поворот лишь одной оси, горизонтальной.

Принцип работы также прост и заключается в следующем:
- Солнечная батарея устанавливается в изначальное положение, когда солнечные лучи попадают на фотоэлемент перпендикулярно.
- После этого к одной из сторон цепляют емкость с водой, а к другой стороне цепляют какой-нибудь предмет такого же веса, что и емкость с водой. Дно емкости должно обладать небольшим отверстием.
- Через него вода будет понемногу вытекать из емкости, из-за чего будет уменьшаться вес, а панель будет потихоньку наклоняться в сторону противовеса. Определить размеры отверстия для емкости придется экспериментально.
Данный способ является наиболее простым. К тому же он экономит материальные средства, которые ушли бы на покупку двигателя, как в случае с часовым механизмом. К тому же, провести монтаж поворотного механизма в виде водяных часов можно самостоятельно, даже не обладая какими-либо специальными знаниями.
Видео
Как сделать трекер для солнечной батареи своими руками, вы узнаете из нашего видео.
Источник