- Солнечные трекеры
- Общие сведения
- Солнечный трекер – принципиальные характеристики
- Разновидности трекеров для солнечных панелей
- Трекеры одноосные
- Двухосные солнечные трекеры
- Варианты управления механизмов позиционирования
- Принципы выбора трекеров для солнечных панелей
- Похожие статьи
- Новые технологии в производстве солнечных батарей. Будущее уже тут.
- Из чего делают солнечные батареи: особенности строения различных поколений панелей
- Устройство слежения за солнцем
Солнечные трекеры
Эффективность солнечных электростанций любого типа напрямую зависит от ориентации на солнце поверхностей панелей или отражающих зеркал. Обеспечить их оптимальное положение относительно светила помогают специальные конструкции – солнечные трекеры. Чем больше степеней свободы имеет поворотное устройство, и чем выше уровень его автоматизации, тем производительнее окажется ваша СЭС.
Общие сведения
Конструкция трекера универсальна и может управлять разворотом:
- модульных полупроводниковых фотоэлектрических батарей;
- параболических зеркал, предназначенных для фокусировки лучей на двигателе Стирлинга или нагревательном баке;
- оптических устройств линзового типа;
- прочих систем на базе PV, CPV, HCPV или CSP улавливателей излучения.
В зависимости от технологических возможностей механизма, трекер для солнечных панелей обеспечивает ориентацию рабочих поверхностей на солнце предельно близко к идеальным 90°. В бюджетных моделях периодическое изменение угла наклона приходится делать вручную. Устройства premium класса изменяют ориентацию автоматически, в режиме реального времени.
Стандартный трекер для солнечных батарей включает следующие комплектующие:
- Несущую конструкцию. Исполняется в виде поворотного механизм на прочной опоре. Вращение может производиться в горизонтальной и вертикальной плоскостях.
- Устройство позиционирования. Отвечает за управление подвижными механизмами, в технической документации обозначенными как актуаторы.
- Блок систем безопасности. Электронная часть комплекса. Защищает систему от перегрузок, перепадов напряжения, ударов молнии и пр. Модели элитного класса оснащаются встроенной миниатюрной метеостанцией, которая при начинающихся сильных ветрах, снегопадах и ливнях дает команду на разворот модулей в безопасное положение.
- Блок управляющих систем. Обеспечивает возможность удаленного управления системой с любого электронного гаджета, на котором установлено соответствующее ПО.
- Система навигации. Обычно присутствует в трекерах на мобильных, способных перемещаться платформах. Предназначается для изменения данных о новом местоположении конструкции – географических параметров широты и долготы.
- Инвертор. Выполняет функцию преобразователя, в том числе и для подачи питания 220V на электродвигатели самого трекера.
Примечание: Уровень технологичности трекера выбирается в зависимости от стоящих перед СЭС задач. Ввиду высокой стоимости оборудования использование подобных систем в маломощных системах экономически нецелесообразно.
Солнечный трекер – принципиальные характеристики
Обязательным набором требований к трекерам любого класса являются:
- большой запас статической и динамической прочности, достаточный для обеспечения устойчивости конструкции при сильных ветрах, граде, ливнях и песчаных бурях;
- максимальная устойчивость к коррозии;
- долговечность и высокое качество поворотных механизмов, особенно частей, подвергающихся трению.
Для наиболее крупных систем желательно наличие встроенных метеостанций. Это даст безусловную гарантию автоматического разворота модулей значительного размера в безопасное положение – торцевой частью к направлению ветра.
Разновидности трекеров для солнечных панелей
Ввиду широкого диапазона спектра требований к этим дорогостоящим установкам, их ассортимент достаточно велик. Уровень технической оснащенности и «продвинутости» трекеров всегда подбирается под конкретные цели, с учетом финансовых затрат. Экономическая целесообразность их приобретения рассчитывается просто – как соотношение средств на приобретение к росту производительности станции, умноженному на стоимость киловатта. Если затраты оказываются меньше потенциальной прибыли, приобретение имеет смысл.
Трекеры одноосные
Отсутствие второй оси делает эту категорию менее дорогостоящей. Направление вращения произвольно и определяется индивидуально, в зависимости от места строительства СЭС.
Существует четыре вида таких трекеров:
- по вертикали – VSAT;
- по горизонтали – HSAT;
- вокруг наклонной оси – TSAT;
- полярное вращение, относительно стороны света – PASAT.
Управляющие алгоритмы носят название SPA (Solar Position Algorithm), и встраиваются в программное обеспечение.
Оптимальная единственная ось определяется по нескольким характеристикам.
1. Вертикальная – Vertical Single Axis Tracker (VSAT). Применяется преимущественно для станций, расположенных в высоких широтах, от 50° северной широты и выше. Вращение осуществляется с Востока на Запад. Выбор связан с низким расположением солнца и позволяет избежать взаимного затенения соседних солнечных блоков, по мере движения светила вдоль горизонта/
2. Горизонтальная – Horizontal Single Axis Tracker (HSAT). Солнечные трекеры с таким направлением вращения оптимальны в низких широтах. Панели или зеркала на протяжении суток медленно поворачиваются с Севера на Юг. Во избежание частичного затенения трубные крепления модулей с системами HSAT необходимо монтировать строго параллельно.
3. Наклонная – Tilted single axis tracker (TSAT). Чаще всего применяется в электростанциях, расположенных на местностях с небольшим уклоном или ступенчато. Выбор направления обусловлен той же причиной – недопустимостью падения тени даже на незначительную часть любой батареи.
4. Полярная – Polar aligned single axis trackers(PASAT). Для средних широт данная конструкция с одной осью признана оптимальной. Поскольку система управления ориентируется на положение Полярной звезды, то угол наклона модулей всегда совпадает с географической широтой местности.
Двухосные солнечные трекеры
Поворотные механизмы с двумя степенями свободы обеспечивают солнечным панелям максимально точную ориентацию на солнце. Это повышает удельную производительность электростанций на 25-40%, и для систем большой мощности полностью оправдывает дополнительные расходы.
Существует две модификации двухосных конструкций трекеров:
- Tip-Tilt Dual Axis Tracker (TTDAT). Основой механизма является крупный шаровой подшипник и удлиненная сверхпрочная опора. Вращение производится вдоль горизонтальной и вертикальной осей. Управление в большинстве случаев электронное.
- Azimuth-Altitude Dual Axis Tracker (AADAT). Наиболее современный и функциональный вариант с азимутной базовой ориентацией. Оригинальным конструктивным решением служит замена шарового механизма поворота на кольцо, с размещением последнего на отдельной платформе. Преимуществом данной разновидности следует назвать возможность монтажа на солнечном трекере типа AADAT сразу значительного числа батарей. Вынужденный недостаток – необходимость увеличивать расстояние между соседними опорными конструкциями из-за большого диаметра кольца. Смена ориентации панелей осуществляется исключительно электроникой.
Варианты управления механизмов позиционирования
Таковых существует три – ручной, автоматический и полуавтоматический способы.
1. Ручное управление
Бюджетные, преимущественно одноосные модели трекеров для солнечных батарей предполагают механическое управление поворотными механизмами. Осуществляется оно полностью вручную, либо с помощью конструкций, называемых актуаторами. В отличие от изменения угла наклона панелей простым поворотом рук, актуаторы управляются специальными тумблерами. При большом количестве панелей это кратно экономит время и не требует применения физической силы. Полностью ручное изменение позиции солнечных панелей производится 2-4 раза в год, обычно весной и осенью. Система с актуаторами применяется для корректировки значительно чаще, примерно раз в месяц.
2. Автоматическое управление
Премиальный класс использует более дорогостоящие, но максимально эффективные автоматические системы изменения позиционирования. Специализированное программное обеспечение осуществляет управление по алгоритму SPA (SolarPosition Algorithm), в on-line режиме отслеживая положение солнца по ниже приведенной схеме.
Информацию о перемещении светила, исполнительные механизмы получают в результате математического расчета основанных на координатах расположения трекера. Преимущество автоматических систем заключается в постоянном определении идеальной позиции панелей без участия человека.
3. Полуавтоматическое управление
Применяется с целью экономии средств на дорогостоящую электронику и ПО. Вместо защищенного компьютерного блока используется достаточно простой логический контроллер с таймером. Время изменения позиции выставляется владельцем вручную.
Принципы выбора трекеров для солнечных панелей
Основным правилом выбора трекерной конструкции является её максимальная целесообразность для конкретных индивидуальных условий – мощности станции, места её расположения, наличия центральной сети и себестоимости элетроэнергии.
В качестве общих рекомендаций можно предложить:
- Одноосный HSAT с вращением по горизонтали – для низких широт и сравнительно маломощных СЭС. Эти системы не слишком дороги, и максимально эффективны во 2-й половине дня, при увеличенном энергопотреблении.
- Одноосный VSAT с вращением по вертикали – в северных регионах, где поворот за солнцем производится по направлению Восток-Запад.
- Двухосные TTDAT и AADAT – для крупных электростанций, где прибыль от минимального повышения производительности с запасом перекрывает затраты на покупку солнечных трекеров.
Похожие статьи
Новые технологии в производстве солнечных батарей. Будущее уже тут.
Применяя инновационные решения, в производстве солнечных модулей, постоянно происходят различные улучшения эффективности, уменьшения влияния затенения и повышения надежности, при этом несколько производителей в настоящее время дают гарантию производительности до 30 лет. Учитывая все новые доступные варианты выбора, стоит провести некоторые исследования, прежде чем инвестировать в солнечную установку. В нашей полной обзорной статье о солнечных панелях мы расскажем, как выбрать надежную солнечную панель и на что обратить внимание.
Из чего делают солнечные батареи: особенности строения различных поколений панелей
До недавних пор на вопрос «из чего делают солнечные батареи» существовал всего один ответ – из кремниевых ячеек в жесткой раме с толстым защитным стеклом. Сегодня ситуация кардинально изменилась, хотя панели на основе кремния по-прежнему занимают бОльшую часть мирового рынка.
Если вам сложно определиться с выбором, напишите нам через форму обратной связи
Если вы не нашли то, что искали, воспользуйтесь поиском по магазину
Товары со скидками, ограниченное предложение, успейте купить выгодно!
Источник
Устройство слежения за солнцем
Как известно, КПД солнечной панели максимально при попадании на нее прямых солнечных лучей. Но т.к. солнце постоянно движется по горизонту, то КПД солнечных батарей сильно падает, когда солнечные лучи падают на панель под углом. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем и автоматически поворачивающие солнечную панель для попадания прямых лучей.
В данной статье представлена схема устройства слежения за солнцем или по другому трэкер (Solar Tracker).
Схема трэкера проста, компактна и вы легко сможете собрать ее своими руками. Для определения позиции солнца, используются два фоторезистора. Мотор включен по схеме H-моста (H-bridge), который позволяет коммутировать ток до 500 мА при напряжении питания 6-15В. В темноте, устройство также работоспособно и будет поворачивать моторчик на наиболее яркий источник света.
Принципиальная схема устройства слежения за солнцем
Как видно на рисунке ниже, схема проста до безобразия и содержит микросхему операционного усилителя LM1458 (К140УД20), транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В), фоторезисторы, диоды 1N4004 (КД243Г), резисторы и подстроечные резисторы.
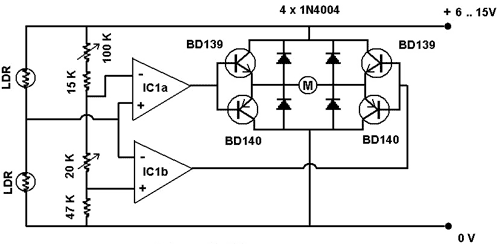
Из схемы видно, что мотор М приводится в движение при разных значениях на выходах ОУ IC1a и IC1b. Таблица истинности:
| Выход IC1a | Выход IC1b | Состояние мотора |
| Низк. | Низк. | |
| Низк. | Выс. | Вперед * |
| Выс. | Выс. | Остановлен |
| Выс. | Низк. | Назад * |
* или наоборот, зависит от подключения мотора
Транзисторы в схеме работают в паре, по диагонали, коммутируя +Ve или -Ve к мотору, и заставляя его вращаться вперед или назад.
Во время остановки мотора, он продолжает вращаться, т.к. присутствует вращающийся момент. Вследствие этого, мотор какое-то время генерирует мощность, которая может вывести транзисторы из строя. Для защиты транзисторов от противоЭДС в схеме моста используется 4 диода.
Входной каскад состоит из двух ОУ (IC1) и фоторезисторов LDR и LDR’. Если количество света, попадающее на них одинаково, то сопротивления фоторезисторов также равны. Следовательно, если напряжение питания 12В, то в месте соединения фоторезисторов LDR LDR’ будет напряжение в 6В. Если количество света попадающего на один фоторезистор будет больше, чем на другом фоторезисторе, то напряжение будет изменяться.
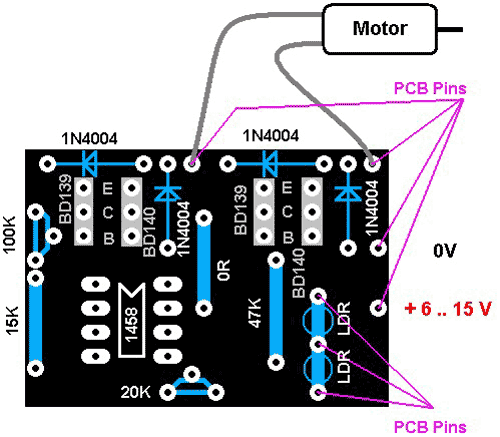
Ограничения (лимиты) от +V до 0V устанавливаются четырьмя последовательно соединенными резисторами и подстраивается 2-мя подстроечными резисторами. Если напряжение выйдет за пределы этих ограничений, то ОУ запустит мотор и он постоянно будет вращаться.
Подстроечный резистор 20K регулируют чувствительность, т.е. диапазон между лимитами. Подстроечник 100К регулирует то, насколько лимиты будут симметричны относительно +V/2 (точка баланса).
Настройка схемы:
1. Проверьте напряжение источника питания схемы
2. Подключите двигатель пост. тока
3. Установите фоторезисторы рядом, чтобы на них попадало одинаковое количество света.
4. Полностью выкрутите оба подстроечный резистора против часовой стрелки
5. Подайте питание на схему. Моторчик закрутиться
6. Вращайте подстроечник 100К по часовой стрелке до тех пор, пока он не остановится. Отметьте эту позицию.
7. Продолжайте вращать подстроечник 100К по часовой стрелке до тех пор, пока мотор не начнет вращаться в другую сторону. Отметьте эту позицию.
8. Разделите угол между двумя позициями пополам и установите там подстроечник (это будет точка баланса).
9. Теперь, вращайте подстроечник 20К по часовой стрелке до тех пор, пока мотор не начнет дергаться
10. Немного верните положение подстроечника назад (против часовой стрелки), чтобы мотор остановился (данный подстроечник отвечает за чувствительность)
11. Проверьте корректность работы схемы, поочередно заслоняя от света один и второй фоторезисторы.
Источник