- Автоматическое позиционирование солнечной батареи
- Солнечные трекеры
- Общие сведения
- Солнечный трекер – принципиальные характеристики
- Разновидности трекеров для солнечных панелей
- Трекеры одноосные
- Двухосные солнечные трекеры
- Варианты управления механизмов позиционирования
- Принципы выбора трекеров для солнечных панелей
- Похожие статьи
- Новые технологии в производстве солнечных батарей. Будущее уже тут.
- Из чего делают солнечные батареи: особенности строения различных поколений панелей
Автоматическое позиционирование солнечной батареи
Данная статья является завершающей в цикле статей о разработке системы позиционирования солнечной батареи. Первая статья была посвящена разработке аппаратного и программного обеспечения схемы слежения за точкой максимальной мощности солнечной батареи для контроллера солнечной батареи.[2] Вторая статья посвящена устройству управления шаговым двигателем на основе микроконтроллера.[3]
Структурная схема системы позиционирования солнечной батареи представлена на рис. 1. В схему входят следующие блоки: преобразователь USB ( схеме установлен блок преобразователя USB в RS-232); фотодатчик – их в данной схеме 2 и они предназначены для преобразования светового потока в электрический сигнал – напряжение; МК – микроконтроллер, который управляет всей периферией устройства, обработкой событий от клавиатуры, тактированием и заданием режимов работы драйвера управления ШД; клавиатура – предназначена для ручного управления вращением солнечной батареи; ЖКИ – жидкокристаллический индикатор, отображающий информацию о текущем состоянии устройства и уровня интенсивности солнечного излучения; блок питания; драйвер шагового двигателя, осуществляющий управление шаговым двигателем, с его помощью задаются параметры, такие как скорость, шаг; ШД – шаговый двигатель, предназначенный для вращения солнечной батареи; солнечная батарея, преобразующая солнечную энергию в постоянный электрический ток; контроллер заряда, контролирующий уровень заряда аккумулятора; аккумулятор; инвертор, преобразующий 12 В постоянного напряжения в 220 В переменного напряжения; нагрузка (различные электрические приборы) [4].
Принципиальная электрическая схема системы позиционирования солнечной батареи изображена на рис. 2.
Главным узлом устройства является микроконтроллер R5F100LE серии G13. Данный микроконтроллер питается от сети с постоянным напряжением 5В, которое прикладывается к выводам Vdd и Vss. Подключение конденсатора С1 в цепь питания микроконтроллера рекомендовано производителем и выполняет функцию фильтра. К портам микроконтроллера подключаются кнопки S1 и S2. для подключения выводов кнопок используются порты ввода/вывода микроконтроллера P60…P61, которые настроены на вход. Кнопки работают следующим образом, по умолчанию на выводах кнопок устанавливается логический «0», с помощью подтягивающих резисторов R10 и R11. При нажатии кнопки S1 на порту P60 устанавливается логическая «1» и происходит соответствующее действие, аналогично с кнопкой S2, только уже на порту P61. [5]
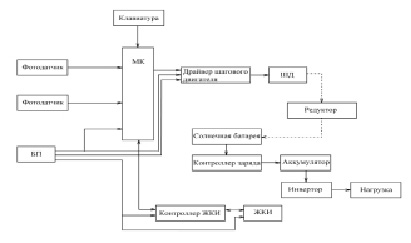
Рис. 1. Структурная схема системы позиционирования солнечной батареи
Жидкокристаллический индикатор на контроллере HD44780 подключается к системе позиционирования солнечной батареи по стандартной схеме, рекомендованной производителем данного изделия. У этого дисплея 8 выводов данных и три вывода управления, не считая выводов питания, подсветки и контроля контрастности. 8 информационных выводов подключаются к порту P1, а три управляющих вывода подключаются к портам Р53 .. Р55. Информационные входы подключены к одному восьмиразрядному порту с целью упрощения программы и увеличения быстродействия работы.
Выводы LED+ и LED- предназначены для подсветки. для регулировки контрастности дисплея используется потенциометр на 10 КОм, регулирующий вывод потенциометра подключен к выводу V0 дисплея.
Сопряжение микросхемы L297 драйвера шагового двигателя с микроконтроллером осуществляется с помощью портов ввода/вывода P01 .. P06, для управления драйверами требуется лишь установка логического нуля или единицы на вывода драйвера, кроме вывода для тактирования CLK. Тактирование осуществляется с помощью порта P04. Данный порт является портом ввода/вывода, который настроен на вывод и генерирует на выходе гармонический сигнал прямоугольной амплитуды, при изменении частоты которого можно менять скорость вращения вала двигателя.
Микросхема L297 является формирователем управляющих сигналов, соединяется с микросхемой L298 по рекомендованной производителем схеме, в основном это четыре линии управления – A,B,C,D. К выходным выводам микросхемы L298 подключается диодная защита, которая исполнена в данном случае в виде микросхемы. Такое включение диодов в цепь обмоток двигателя позволяет срезать выброс напряжений отрицательной амплитуды на выводах двигателя, без данной защиты это напряжение может пробить внутреннюю цепь компонента L298.
Элемент А1, представляет собой солнечную батарею, которая состоит из параллельно и последовательно соединенных фотоэлементов SC1…SC6, предназначенных для преобразования солнечной энергии в постоянный электрический ток. Так же в системе присутствует контроллер заряда, который контролирует заряд аккумулятора и представлен на схеме как контакты Х1. Он имеет следующие выводы: +SB и -SB к которым соединяются плюсовой и минусовой вывод солнечной батареи, +Battery и – Battery, данные выводы идут к соответствующим выводам аккумулятора, и выводы +Load и –Load, предназначены для подключения нагрузки, в данном случае это светодиод.
Для накопления преобразованной солнечной батареей энергии, используется аккумулятор Bat1, который подключен к контроллеру заряда, как описано выше и также подключен к инвертору, который представлен на схеме как контакты Х2. Инвертор предназначен для преобразования постоянного тока в переменный и имеет следующие выводы +12В и -12В соединенные к аккумулятору и выводы с переменным напряжением 220 В к которым может быть подключена нагрузка.
Для питания всей периферии устройства используются два блока питания, с выходными напряжениями 5 и 12в.
Внешний вид системы позиционирования солнечной батареи показан на рис. 3.
Система позиционирования солнечной батареи состоит из платформы с вращающейся на 120° солнечной батарей и контроллера SOLBAT.
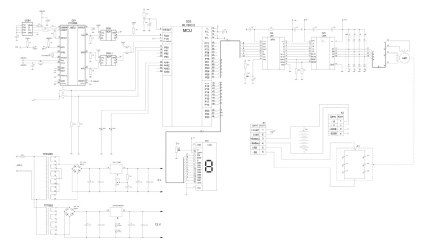
Рис. 2. Электрическая принципиальная схема системы позиционирования солнечной батареи

Рис. 3. Внешний вид системы позиционирования солнечной батареи
Недостатком используемого алгоритма слежения за точкой максимальной мощности солнечного излучения является отсутствие вращения платформы вокруг вертикальной оси. для устранения этого недостатка необходимо включить в устройство дополнительный шаговый двигатель для реализации механизма вращения платформы вокруг вертикальной оси. Это даст возможность дополнить алгоритм слежения за точкой максимальной мощности солнечного излучения составляющей, позволяющей осуществлять автоматическое слежение во все времена года.
Используя систему позиционирования солнечной батареи для точных измерений солнечной радиации в южных регионах можно получить данные о количестве падающей солнечной энергии на солнечную панель. Это позволит определить оптимальную ориентацию солнечных панелей и предполагаемый объем выработки электроэнергии при строительстве солнечных электростанций.
Источник
Солнечные трекеры
Эффективность солнечных электростанций любого типа напрямую зависит от ориентации на солнце поверхностей панелей или отражающих зеркал. Обеспечить их оптимальное положение относительно светила помогают специальные конструкции – солнечные трекеры. Чем больше степеней свободы имеет поворотное устройство, и чем выше уровень его автоматизации, тем производительнее окажется ваша СЭС.
Общие сведения
Конструкция трекера универсальна и может управлять разворотом:
- модульных полупроводниковых фотоэлектрических батарей;
- параболических зеркал, предназначенных для фокусировки лучей на двигателе Стирлинга или нагревательном баке;
- оптических устройств линзового типа;
- прочих систем на базе PV, CPV, HCPV или CSP улавливателей излучения.
В зависимости от технологических возможностей механизма, трекер для солнечных панелей обеспечивает ориентацию рабочих поверхностей на солнце предельно близко к идеальным 90°. В бюджетных моделях периодическое изменение угла наклона приходится делать вручную. Устройства premium класса изменяют ориентацию автоматически, в режиме реального времени.
Стандартный трекер для солнечных батарей включает следующие комплектующие:
- Несущую конструкцию. Исполняется в виде поворотного механизм на прочной опоре. Вращение может производиться в горизонтальной и вертикальной плоскостях.
- Устройство позиционирования. Отвечает за управление подвижными механизмами, в технической документации обозначенными как актуаторы.
- Блок систем безопасности. Электронная часть комплекса. Защищает систему от перегрузок, перепадов напряжения, ударов молнии и пр. Модели элитного класса оснащаются встроенной миниатюрной метеостанцией, которая при начинающихся сильных ветрах, снегопадах и ливнях дает команду на разворот модулей в безопасное положение.
- Блок управляющих систем. Обеспечивает возможность удаленного управления системой с любого электронного гаджета, на котором установлено соответствующее ПО.
- Система навигации. Обычно присутствует в трекерах на мобильных, способных перемещаться платформах. Предназначается для изменения данных о новом местоположении конструкции – географических параметров широты и долготы.
- Инвертор. Выполняет функцию преобразователя, в том числе и для подачи питания 220V на электродвигатели самого трекера.
Примечание: Уровень технологичности трекера выбирается в зависимости от стоящих перед СЭС задач. Ввиду высокой стоимости оборудования использование подобных систем в маломощных системах экономически нецелесообразно.
Солнечный трекер – принципиальные характеристики
Обязательным набором требований к трекерам любого класса являются:
- большой запас статической и динамической прочности, достаточный для обеспечения устойчивости конструкции при сильных ветрах, граде, ливнях и песчаных бурях;
- максимальная устойчивость к коррозии;
- долговечность и высокое качество поворотных механизмов, особенно частей, подвергающихся трению.
Для наиболее крупных систем желательно наличие встроенных метеостанций. Это даст безусловную гарантию автоматического разворота модулей значительного размера в безопасное положение – торцевой частью к направлению ветра.
Разновидности трекеров для солнечных панелей
Ввиду широкого диапазона спектра требований к этим дорогостоящим установкам, их ассортимент достаточно велик. Уровень технической оснащенности и «продвинутости» трекеров всегда подбирается под конкретные цели, с учетом финансовых затрат. Экономическая целесообразность их приобретения рассчитывается просто – как соотношение средств на приобретение к росту производительности станции, умноженному на стоимость киловатта. Если затраты оказываются меньше потенциальной прибыли, приобретение имеет смысл.
Трекеры одноосные
Отсутствие второй оси делает эту категорию менее дорогостоящей. Направление вращения произвольно и определяется индивидуально, в зависимости от места строительства СЭС.
Существует четыре вида таких трекеров:
- по вертикали – VSAT;
- по горизонтали – HSAT;
- вокруг наклонной оси – TSAT;
- полярное вращение, относительно стороны света – PASAT.
Управляющие алгоритмы носят название SPA (Solar Position Algorithm), и встраиваются в программное обеспечение.
Оптимальная единственная ось определяется по нескольким характеристикам.
1. Вертикальная – Vertical Single Axis Tracker (VSAT). Применяется преимущественно для станций, расположенных в высоких широтах, от 50° северной широты и выше. Вращение осуществляется с Востока на Запад. Выбор связан с низким расположением солнца и позволяет избежать взаимного затенения соседних солнечных блоков, по мере движения светила вдоль горизонта/
2. Горизонтальная – Horizontal Single Axis Tracker (HSAT). Солнечные трекеры с таким направлением вращения оптимальны в низких широтах. Панели или зеркала на протяжении суток медленно поворачиваются с Севера на Юг. Во избежание частичного затенения трубные крепления модулей с системами HSAT необходимо монтировать строго параллельно.
3. Наклонная – Tilted single axis tracker (TSAT). Чаще всего применяется в электростанциях, расположенных на местностях с небольшим уклоном или ступенчато. Выбор направления обусловлен той же причиной – недопустимостью падения тени даже на незначительную часть любой батареи.
4. Полярная – Polar aligned single axis trackers(PASAT). Для средних широт данная конструкция с одной осью признана оптимальной. Поскольку система управления ориентируется на положение Полярной звезды, то угол наклона модулей всегда совпадает с географической широтой местности.
Двухосные солнечные трекеры
Поворотные механизмы с двумя степенями свободы обеспечивают солнечным панелям максимально точную ориентацию на солнце. Это повышает удельную производительность электростанций на 25-40%, и для систем большой мощности полностью оправдывает дополнительные расходы.
Существует две модификации двухосных конструкций трекеров:
- Tip-Tilt Dual Axis Tracker (TTDAT). Основой механизма является крупный шаровой подшипник и удлиненная сверхпрочная опора. Вращение производится вдоль горизонтальной и вертикальной осей. Управление в большинстве случаев электронное.
- Azimuth-Altitude Dual Axis Tracker (AADAT). Наиболее современный и функциональный вариант с азимутной базовой ориентацией. Оригинальным конструктивным решением служит замена шарового механизма поворота на кольцо, с размещением последнего на отдельной платформе. Преимуществом данной разновидности следует назвать возможность монтажа на солнечном трекере типа AADAT сразу значительного числа батарей. Вынужденный недостаток – необходимость увеличивать расстояние между соседними опорными конструкциями из-за большого диаметра кольца. Смена ориентации панелей осуществляется исключительно электроникой.
Варианты управления механизмов позиционирования
Таковых существует три – ручной, автоматический и полуавтоматический способы.
1. Ручное управление
Бюджетные, преимущественно одноосные модели трекеров для солнечных батарей предполагают механическое управление поворотными механизмами. Осуществляется оно полностью вручную, либо с помощью конструкций, называемых актуаторами. В отличие от изменения угла наклона панелей простым поворотом рук, актуаторы управляются специальными тумблерами. При большом количестве панелей это кратно экономит время и не требует применения физической силы. Полностью ручное изменение позиции солнечных панелей производится 2-4 раза в год, обычно весной и осенью. Система с актуаторами применяется для корректировки значительно чаще, примерно раз в месяц.
2. Автоматическое управление
Премиальный класс использует более дорогостоящие, но максимально эффективные автоматические системы изменения позиционирования. Специализированное программное обеспечение осуществляет управление по алгоритму SPA (SolarPosition Algorithm), в on-line режиме отслеживая положение солнца по ниже приведенной схеме.
Информацию о перемещении светила, исполнительные механизмы получают в результате математического расчета основанных на координатах расположения трекера. Преимущество автоматических систем заключается в постоянном определении идеальной позиции панелей без участия человека.
3. Полуавтоматическое управление
Применяется с целью экономии средств на дорогостоящую электронику и ПО. Вместо защищенного компьютерного блока используется достаточно простой логический контроллер с таймером. Время изменения позиции выставляется владельцем вручную.
Принципы выбора трекеров для солнечных панелей
Основным правилом выбора трекерной конструкции является её максимальная целесообразность для конкретных индивидуальных условий – мощности станции, места её расположения, наличия центральной сети и себестоимости элетроэнергии.
В качестве общих рекомендаций можно предложить:
- Одноосный HSAT с вращением по горизонтали – для низких широт и сравнительно маломощных СЭС. Эти системы не слишком дороги, и максимально эффективны во 2-й половине дня, при увеличенном энергопотреблении.
- Одноосный VSAT с вращением по вертикали – в северных регионах, где поворот за солнцем производится по направлению Восток-Запад.
- Двухосные TTDAT и AADAT – для крупных электростанций, где прибыль от минимального повышения производительности с запасом перекрывает затраты на покупку солнечных трекеров.
Похожие статьи
Новые технологии в производстве солнечных батарей. Будущее уже тут.
Применяя инновационные решения, в производстве солнечных модулей, постоянно происходят различные улучшения эффективности, уменьшения влияния затенения и повышения надежности, при этом несколько производителей в настоящее время дают гарантию производительности до 30 лет. Учитывая все новые доступные варианты выбора, стоит провести некоторые исследования, прежде чем инвестировать в солнечную установку. В нашей полной обзорной статье о солнечных панелях мы расскажем, как выбрать надежную солнечную панель и на что обратить внимание.
Из чего делают солнечные батареи: особенности строения различных поколений панелей
До недавних пор на вопрос «из чего делают солнечные батареи» существовал всего один ответ – из кремниевых ячеек в жесткой раме с толстым защитным стеклом. Сегодня ситуация кардинально изменилась, хотя панели на основе кремния по-прежнему занимают бОльшую часть мирового рынка.
Если вам сложно определиться с выбором, напишите нам через форму обратной связи
Если вы не нашли то, что искали, воспользуйтесь поиском по магазину
Товары со скидками, ограниченное предложение, успейте купить выгодно!
Источник